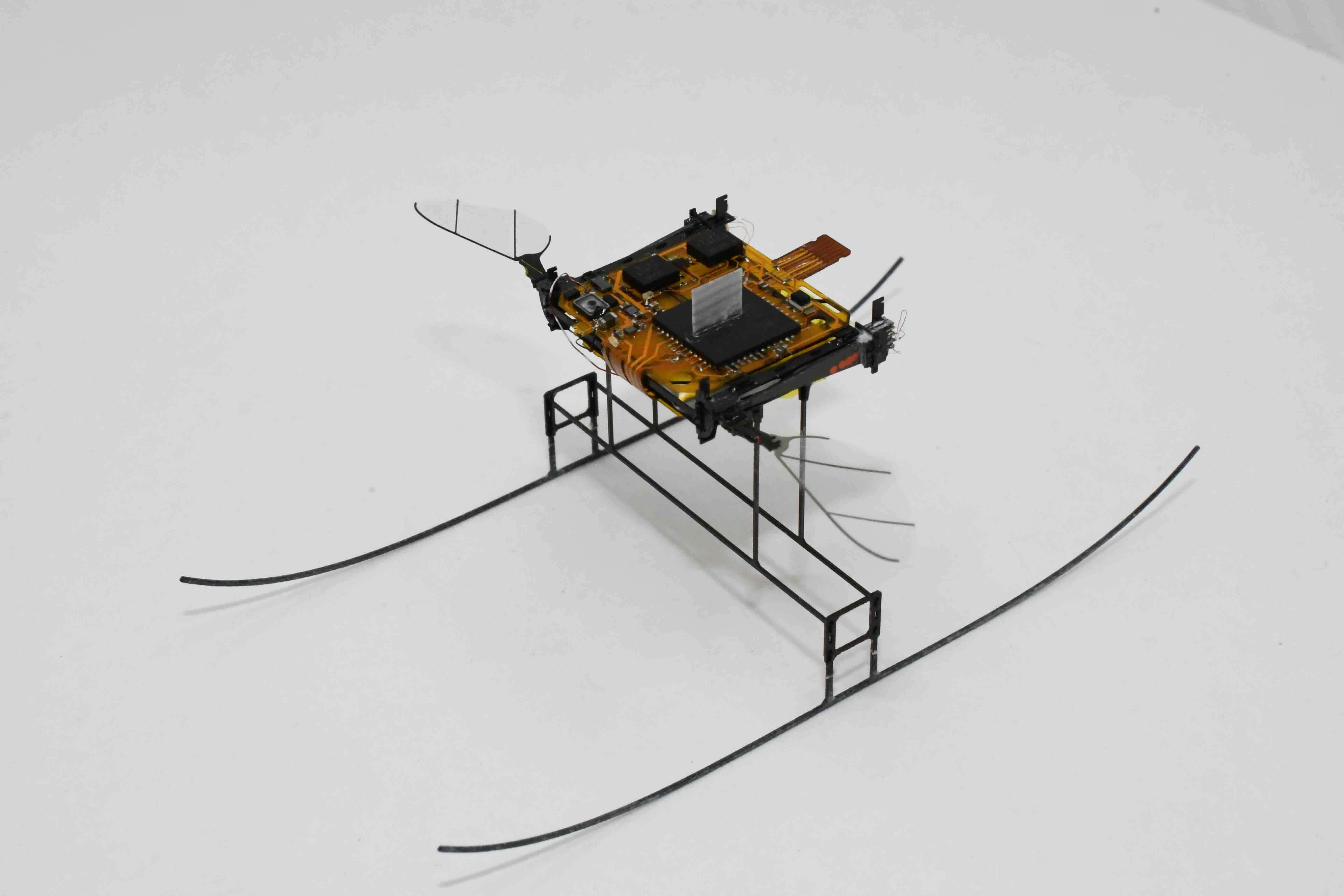
GammaBot
A surface-skimming robot inspired by water striders, leveraging surface tension to stay afloat and small wings for propulsion. Weighs < 1 g.
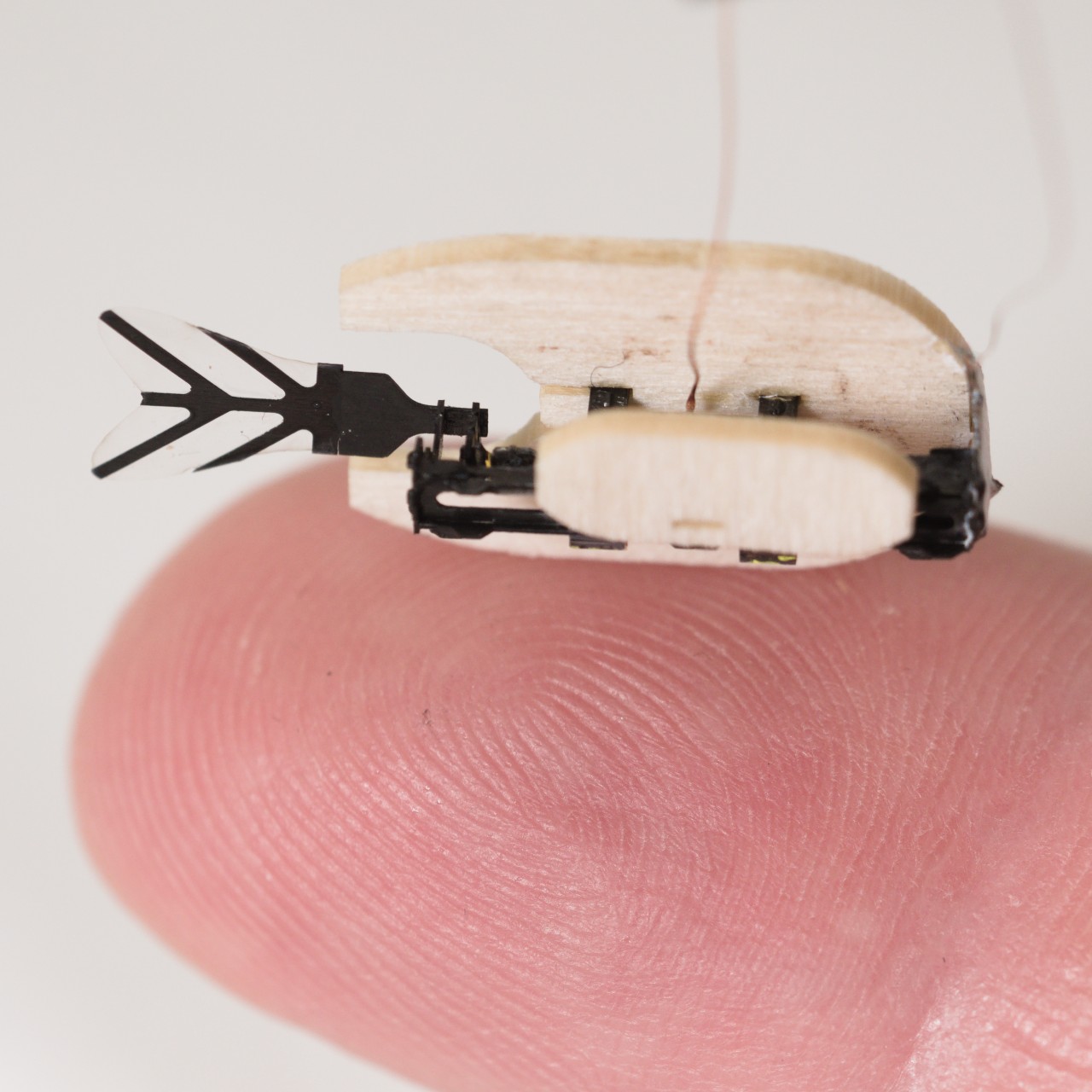
Daniobot
A fish-inspired microrobot that maneuvers into tight underwater spaces. Self-contained and powered, < 1 g total mass.
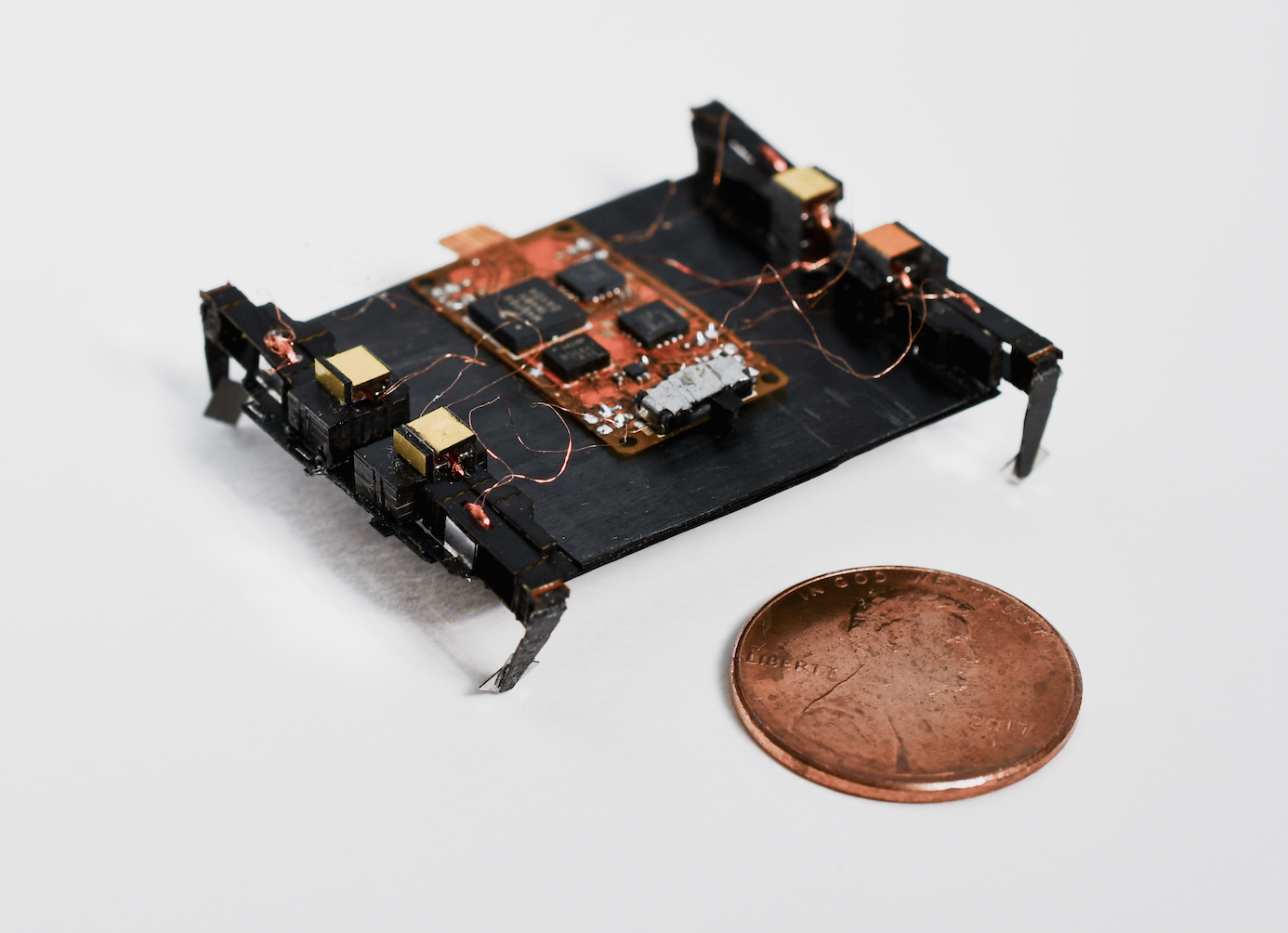
COMT
A tetherless 2 g terrestrial crawler for ground locomotion at small scales.